Point Cloud Data
Point cloud imaging is an important and effective technique used widely across varied and diverse industries. A point cloud is a dataset of co-ordinates in space, with each co-ordinate represented by a point in (x,y,z) space. Sometimes, the points have additional attributes such as colour (R,G,B). These points generally represent a 3D object or scene. This makes for a very easy and compact representation, which can be done in a simple text file or a binary equivalent. Common formats include: .xyz, .ply and .pcd. Point clouds can contain millions or sometimes billions of points, so the raw data files can get quite big!
Point clouds are commonly produced by scattering energy across a scene or object and then collecting the scattered or reflected energy using a sensor or array of sensors. For example, a RADAR (Radio Detection and Ranging) uses radio waves that are transmitted in a certain direction via an antenna, which are then reflected back from a target to be detected by the same antenna. The targets are often quite large (10’s sq. metres) which are quite far away (10-100 km) and the wavelength of the radio waves is typically a few cm (microwave energy band).
Rendering points
Point cloud data can be rendered via a variety of techniques, including rasterising or volume rendering techniques. Volumetric rendering is better suited to transluscent data from e.g. medical scanners, discussed here. Rasterising is more common and this approach is used by our Holoviewer tool. Most common computer graphics formats are made up of mesh geometry, rather than single points. A mesh is comprised of polygons that form the surface of an object, the simplest of which is a triangle made of 3 vertices in 3D space that form a face. It is therefore desirable to convert point cloud data from points to vertices (for meshes) and any accopanying colour information is converted into a texture that is applied to this mesh. This can lead to a very compact and efficient representation of the object. There are a number of techniques that enable point cloud data to be converted where many software algorithms and tools have been developed to accomplish this.
Point cloud data shown on a 32-inch Looking Glass 3D Light Field Display
LiDAR
LiDAR (Light Detection and Ranging) works by scanning an object using laser or LED light and then detecting it using a photo-sensor or camera. Lidars typicall use an infra-red (IR) light (size of microns) to perform the ranging and detection, where is scene or object is within ~100 m. Detection is performed by a photodiode or an infra-red camera. Image resolution depends on many factors (distance, energy, sensor resolution, optics) and this can be down to a few mm or even sub-mm. The IR channel captures the scene depth, which is often accompanied by regular RGB cameras to get colour information.
Lidar technology is often deployed on drones to gather multiple views of larger scenes like buildings or landscapes. The two are often combined in software. Example data types include .XYZ, .PCD and .LAS file formats.
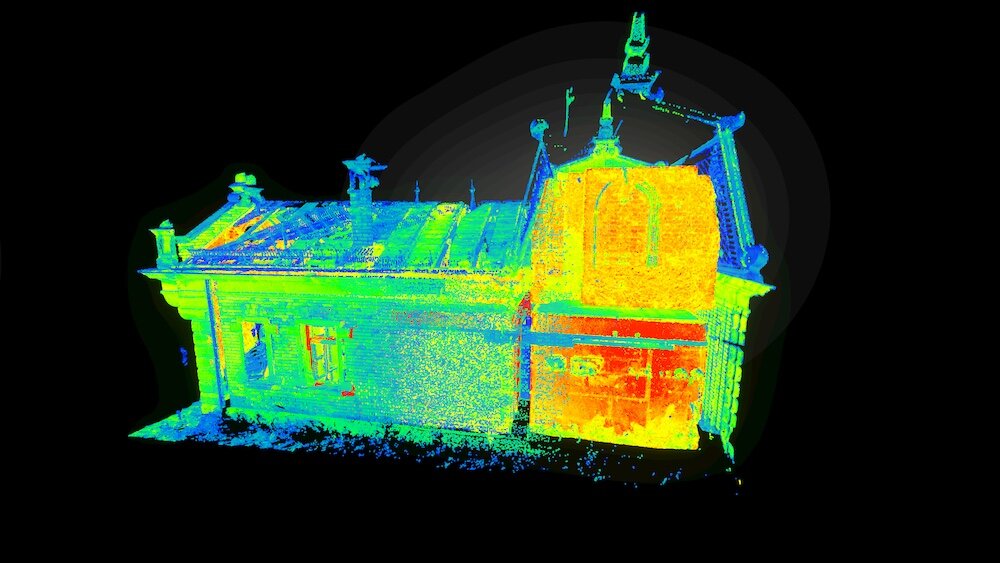
Lidar has the benefit of introducing advanced imaging features, including hyperspectral imaging and thermal imaging. Hyperspectral imaging captures additional information per pixel on the wavelengths entering that pixel. Thermal imaging captures the temperature of photons hitting the pixels on the sensor, as shown below.
Sonar
Sonar (Sound Navigation and Ranging) is a technique that uses sound waves to image targets under water. The following point cloud of the Royal Oak WW2 sunk battleship was commissioned by the Royal Navy, consisting of 1.1M points. The data is usually provided in a proprietary format and we have tools to convert it into something that we can pick up with our software.
Retinal Imaging
The following ultra-widefield scan of the human retina was performed by Optos using IR low power scanning laser technique. In this case, the points and colour data were combined into a mesh and a texture to define the 3D image via regular computer graphics techniques.

We hope that this overview has given you a good idea on the importance of point cloud data, which is the simplest type of 3D data around. This makes it very versatile which means that it can be applied in many different fields.